O(V + E) Algorithm - Breadth-First Search
上一篇介绍了哈希表,这一篇我们来讨论 关于图(graph)的内容及一个非常实用的算法-- 广度优先搜索(Breadth First Search, aka BFS)。
一个图由节点(node)和边(edge)组成,而且如果节点A可以直接到达的节点B,那么称B是A的neighbor,如:
--- --- ---
| A | -> | B | -> | C |
--- --- ---
B是A的neighbor,C是B的neighbor,但是C不是A的neighbor。
上面的图的边是带箭头的,我们称这样的图为有向图(directed graph),边不带箭头的为无向图(indrected graph)。 如果是无向图的话,只要两个节点有边连接,那么这两个节点便互为neighbor。
如果给图的边加上权重(weight),那么图就变成了weighted graph,反之,就是unweighted graph。
在了解了图的基础知识之后,我们来介绍广度优先搜索(Breadth First Search, aka BFS),这个算法可以用来 对有向无权重图(directed unweighted graph)做两件事情:
- 判断一个节点是否可以到达另一个节点
- 如果一个节点可以到达另一个节点,那么求两者之间的最短路径
第一件事我是已经理解了的,至于第二件事,更多的会使用Dijkstra's Algorithm去求解。虽然Dijkstra's Algorithm 一般是用来求解有向加权图的最短路径,但是无权图也可以看作各边权重相等的加权图,因此也可以用Dijkstra's Algorithm 来求解,这里就不做介绍了,等下一篇介绍Dijkstra's Algorithm的时候再细讲。
好,现在我们来描述BFS的算法,假设我们想找一个有向无权重图中节点A是否可以到达节点B,我们可以这样做:
1. 先把节点A的所有neighbors加入对列
2. 从对列中取出一个节点,先判断它是否已经被检查过。如果已经被检查过,
那么就跳过它。如果没有被检查过,则判断它是否为节点B。如果是,则
返回True;反之则将该节点的所有neighbors加入对列,并把这个节点标记
为检查过
3. 重复第二步,直到对列的所有节点都检查过了,返回False
通过描述我们可以看到,BFS需要检查图中每一个节点,如果这个节点不是我们要找的节点,那么还需要把它的所有neighbors 加入队列,所以还要检查所有的边,因此BFS的时间复杂度为O(V + E),V for vertices,E for edges。
描述完算法,我们可以实例化一个场景,并用Go语言实现。这里我们借用图书Grokking Algorithms的例子 -- Find The Mango Seller。
BTW:其实这几篇关于算法的post都是自己读Grokking Algorithms的一些笔记,这是一本非常棒的算法入门书,而且我会向身边任何对算法感兴趣的新手推荐这本书。
例子是这样的,现在你有一批芒果需要出售,要在自己的Facebook朋友圈中找到一个mango seller,把自己的芒果出售给他。
假设你的朋友圈是这样的:
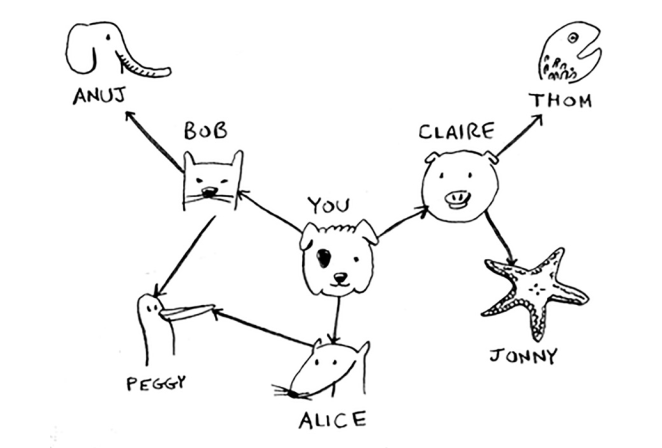
那么你应该怎么做呢?
用BFS就可以很好的解决这个问题,我们从“You”出发,把“You”的三个朋友加入对列。然后从对列中取出一个朋友, 判断他是不是mango seller。如果是,那么我们返回True;反之,把他标记为已搜索,并把他的朋友也加入 列队。接着,重复这一过程,直到图中的所有节点都检查过,返回False。这里多嘴一句,怎样把朋友标记为“已经搜索” 呢?这是一个查重问题,而我们知道一种数据结构专门可以解决查重问题,也许你已经想起来了,那就是Hash Table!
这里是go语言的实现。
以上。